随着科技的飞速发展,机器人已经从科幻小说中的概念走进了我们的日常生活。无论是家用的扫地机器人,还是工业生产线上的自动化设备,机器人都在各个领域发挥着越来越重要的作用。其中,机器人的感知能力是实现其智能化行为的关键。
机器人的感知主要依赖于传感器。传感器是机器人的“五官”,负责接收外部环境的信息,并将其转化为电信号,供机器人理解和处理。根据应用需求,传感器种类繁多,包括但不限于温度传感器、湿度传感器、光线传感器、距离传感器等。
例如,扫地机器人可能需要温度和湿度传感器来感知环境中的温度和湿度变化,从而调整清扫策略;工业机器人可能需要光线和距离传感器来识别工作环境中的障碍物,以避免碰撞。这些传感器通过与机器人内部处理器的连接,将信息转化为机器人可以理解和执行的动作。
除了依赖外部传感器,现代机器人还通过内置摄像头、麦克风等设备进行更复杂的感知。例如,服务型机器人可以通过人脸识别技术识别用户,并通过语音识别技术理解用户的指令。这些内置设备让机器人不仅能感知外部环境,还能与人类进行交互,进一步增强了其智能化水平。
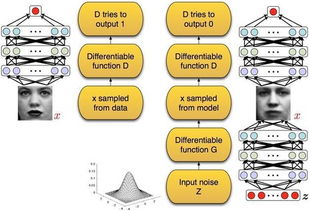
深度学习等人工智能技术的发展也为机器人的感知能力提供了新的可能。通过训练神经网络模型,机器人可以学习如何理解和处理输入的信息,从而在复杂的环境中自主行动。
机器人的感知能力是其实现智能化行为的基础。而这一能力的来源主要是各种传感器和人工智能技术。随着科技的进步,我们有理由相信,未来的机器人将拥有更强大的感知能力,更好地适应和服务于我们的生活。