机器人感知系统主要包含两类传感器:内部传感器和外部传感器。
内部传感器:
1. 位置和角度传感器 :比如光感器,用来感知道器在空间中的运动和角度。
2. 运动状态传感器 :用于感知机械臂的位置和运动状态。
外部传感器:
1. 距离传感器 :常被用在触觉传感系统之中,以感知道器距离某个物体的距离。
2. 表面温度传感器 :这类传感器常被应用在检查机器人的操作对象的表面温度时。
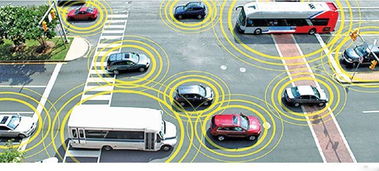
3. 障碍物检测传感器 :用于检测机器人前进道路上的障碍物,如激光雷达等。

这些智能机器能够在各种环境中进行自主操作,其中关键就在于它们的感知系统。准确地说,机器人感知系统主要包括两大类传感器:内部传感器和外部传感器。

内部传感器,顾名思义,是用来感知机器人自身状态的传感器。这些传感器包括:
1. 惯性传感器:惯性传感器是机器人感知自身动态和静态状态的关键元件,主要包含陀螺仪和加速度计。它们可以提供关于机器人的速度、位置和姿态的信息。
2. 触觉传感器:触觉传感器是让机器人感知接触和操作的传感器,它们可以检测物体的形状、大小、质地等信息。
3. 声音传感器:声音传感器让机器人能够听到周围的声音,从而进行声音识别、语音交互等功能。

外部传感器则是用来感知机器人与外部环境交互的传感器,主要包括:
1. 距离传感器:距离传感器能够感知机器人与周围物体的距离,从而帮助机器人进行避障、路径规划等操作。
2. 视觉传感器:视觉传感器让机器人能够看到周围的物体和环境,进行物体识别、场景理解等功能。
3. 磁场传感器:磁场传感器可以帮助机器人感知磁场的变化,用于导航、物体检测等功能。
在机器人感知系统中,这两类传感器相互协同作用,才能使机器人在复杂多变的环境中进行准确、高效的自主操作。随着科技的不断发展,我们期待着这些传感器在未来的机器人感知系统中发挥更大的作用,使我们的生活更加便利和智能。
以上就是关于机器人感知系统的文章,希望对您有所帮助。让我们期待科技给生活带来的美好改变!