======================
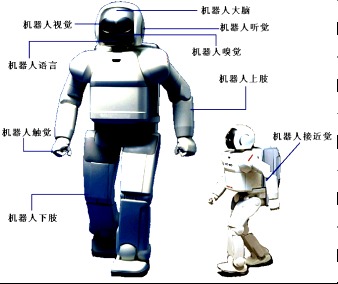
1. 感知能力概述--------
随着科技的不断发展,机器人已逐渐成为我们日常生活的一部分。机器人的感知能力是实现其自主行为的关键。它不仅包括对环境的物理特征的感知,还包括对环境的语义理解,甚至是对人类情绪的识别。本篇文章将详细讨论机器人的各种感知能力。
2. 视觉感知-------
视觉感知是机器人通过摄像头获取环境图像信息的能力。机器人通过图像处理技术,可以识别图像中的物体,判断其位置、运动状态等信息。例如,机器人可以通过视觉感知来识别行人、车辆、地形等重要信息,从而在自动驾驶、安保监控等领域发挥重要作用。
3. 听觉感知-------
听觉感知是机器人接收、处理和识别声音信息的能力。通过语音识别技术,机器人可以理解人类的语言,甚至可以进行语音交流。例如,智能家居系统可以通过听觉感知来监听家庭成员的对话,从而根据指令来控制家电。
4. 触觉感知-------
触觉感知是机器人通过接触来感知环境的能力。这包括对物体的形状、大小、硬度、温度等物理特性的感知。例如,在工业制造中,触觉传感器可以用于检查产品质量,或在手术中,用于精确控制手术器械的位置。
5. 嗅觉感知-------
嗅觉感知是机器人通过气味传感器来识别环境中的气味的能力。这可以用于检测环境中的有害气体,或者在救援任务中,用于寻找被困的人员。
6. 味觉感知-------
味觉感知是机器人通过味觉传感器来识别环境中的味道的能力。这可以用于检测食品的质量,或者在医疗领域,用于药物检测和分析。
7. 深度感知-------
深度感知是机器人通过激光雷达(LIDAR)或深度相机等设备获取环境的三维信息的能力。这可以用于实现精确的定位和导航,或者在虚拟现实领域,用于创建高精度的环境模型。
8. 物体识别-------
物体识别是机器人识别环境中物体类型和形状的能力。这可以通过机器学习算法来实现,例如卷积神经网络(C)等。物体识别可以用于实现自动分类、目标追踪等功能。
9. 环境理解-------
环境理解是机器人理解环境语义的能力。这包括对场景的理解,例如房间的结构、物体的布局等。环境理解可以用于实现智能导航、自然语言交流等功能。
10. 情感识别-------
情感识别是机器人识别人类情绪的能力。这可以通过分析人类的语音、面部表情、身体语言等信息来实现。情感识别可以用于实现人机交互的个性化,提高用户体验。
11. 自主导航-------
自主导航是机器人在未知环境中自我导航的能力。这需要结合多种感知能力,例如视觉感知、深度感知、物体识别等。自主导航可以实现自主行驶、自动避障等功能,是无人驾驶等领域的关键技术。
1
2. 未来展望--------
随着科技的不断发展,机器人的感知能力将越来越强大。未来的机器人将更加智能化,能够更好地适应各种复杂的环境和任务。同时,机器人的感知能力也将更加多元化,包括更多的感官和认知能力,从而实现更加自然的交互和更加智能的行为。