随着科技的飞速发展,机器人技术也在不断创新与进步。机器人感知自身与外部环境的变化是实现自主导航、交互和决策的关键。本文将深入探讨这一主题,介绍机器人感知的原理,以及当前和未来的相关技术挑战。

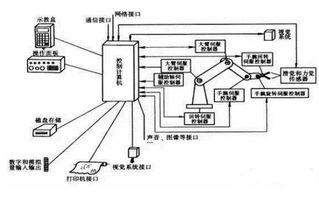
1. 内部传感器:机器人内部的传感器主要包括陀螺仪、加速度计、编码器等,用于测量机器人的姿态、位置、速度等。这些传感器为机器人提供了关于自身状态和运动的信息,使得机器人可以在没有外部干预的情况下保持正确的方向和姿态。
2. 解析器:解析器则是机器人的“大脑”,负责处理和解释内部传感器的数据。解析器可以对机器人的运动状态进行实时监测,并对其进行调整以确保其稳定运行。

1. 外部传感器:机器人通过外部传感器(如激光雷达、摄像头、超声波传感器等)获取关于外部环境的信息。这些传感器能够测量机器人与周围物体之间的距离、方向和速度,帮助机器人理解并适应外部环境。
2. 识别技术:结合深度学习和计算机视觉技术,机器人可以识别和理解外部环境的特征,如物体形状、颜色、纹理等。这使得机器人能够在复杂的环境中自我导航,并做出适应性的决策。

1. 提高感知精度:尽管现有的传感器和识别技术已经取得了显著的进步,但提高感知精度仍是持续的挑战。更准确的感知能力将使机器人在更复杂和动态的环境中实现更高级别的自主性。
2. 传感器融合:多模态传感器融合将成为提高机器人感知能力的重要方向。将不同类型和功能的传感器进行有效的集成和融合,将为机器人提供更全面、准确的外部环境信息。
3. 增强学习与自我适应:随着深度学习技术的不断发展,增强学习将在机器人感知领域发挥更大的作用。机器人将能够通过自我学习和适应,提高在未知环境中的感知和决策能力。
4. 降低成本与普及化:虽然高端的机器人技术已经取得了显著的进步,但如何降低成本,让更多的普通用户能够接触和使用这些技术,仍是未来的一个重要挑战。
5. 人机交互与协作:随着感知能力的提高,未来的机器人将更加注重与人或其他机器人的交互与协作。这将涉及到情感识别、语言理解、物理交互等多方面的技术挑战。
机器人感知自身与外部环境的能力是其实现自主导航、交互和决策的关键。通过内部传感器、解析器和外部传感器,以及深度学习和计算机视觉等技术,机器人已经能够在复杂的环境中发挥重要的作用。面对未来的挑战和需求,我们还需要继续研究和探索新的技术,以进一步提高机器人的感知能力。