这是我第一次参加电子竞技比赛。我想我没有太多时间参加电子竞技。从开始到结束,经历了种种波折,队友告诉我,一场没有经过波折的电竞比赛是不完整的,最终,完成了电竞冠军的一部分。这并不容易。造一辆能跑的车很难
第一天看题,之前没做过车号识别。可以用openmv4来运行,然后按照之前的思路来做,利用模板匹配来实现数字识别。想想很简单,但做起来却并不容易。 ,只要你有双手。到了下午进行测试赛的时候,误差太大了。后来我很快就订购了一台4plus相机。
使用另一个计划。
第二天我继续做电子竞赛,存储和标记数字信息,训练数据集,运行卷积。结果午休时电池爆炸了。幸运的是,每个人都很好。
插座全部烧毁,队伍已无存。后来又去别的地方找电源插座,太离谱了
12.07 7的意志 休息了一会儿,看到edg赢了,就继续肝电赛,继续搞鉴定。早上相机到了,计划立马改变。终于,到了晚上八点。封好盒子后,我松了口气,看向对面,一片空白。
1。我对 openmv4plus 有了更新的理解。虽然以后我没有时间参加电竞了,但这也是我大三记录的唯一一次电竞。接下来,小白准备考试。希望大家能给我考研准备的资料
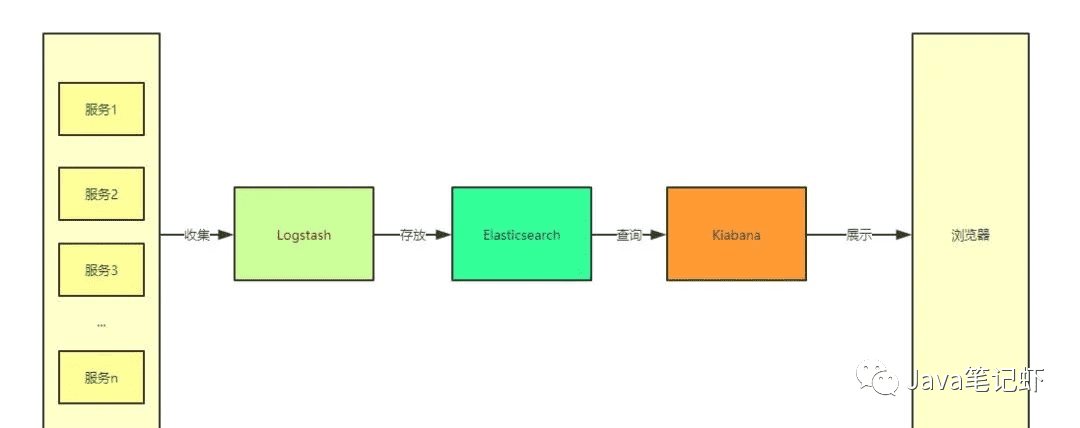
2 电子竞赛准备的数字识别
1 保存数据集
2 使用网站用KNN训练数据集

3.导入模型进行计算
#导入功能包
导入pyb
导入传感器、图像、时间、数学
导入操作系统、tf
#相机传感器配置
传感器.reset()
传感器.set_pixformat(传感器.RGB565)
Sensor.set_framesize(sensor.QQVGA) # 如果分辨率大得多,我们就会耗尽内存...
传感器.设置_亮度(1500)
传感器.skip_frames(时间= 20)
sensor.set_auto_gain(False) # 必须将其关闭以防止图像冲刷...
sensor.set_auto_whitebal(True,(0,0x80,0)) # 必须将其关闭以防止图像冲刷...
时钟 = time.clock()
#导入模型net_path = "traind.tflite" # 定义模型的路径
labels = ["1", "2", "3","4","5", "6", "7", "8"] # 加载标签
net = tf.load(net_path, load_to_fb=True) # 加载模型
而(真):
#拍个照
img = 传感器.snapshot()
#查找矩形
对于 img.find_rects 中的 r(阈值 = 20000):
#矩形框
img.draw_rectangle(r.rect(), 颜色 = (255, 0, 0))
#提取矩形内的图像
img1 = img.copy(r.rect())
#运行模型识别
对于tf.classify中的obj(net,img1,min_scale = 1.0,scale_mul = 0.5,x_overlap = 0.0,y_overlap = 0.0):
#计算结果
排序列表=排序(zip(标签,obj.output()),键= lambda x:x [1],反向= True)
打印(排序列表[0][0])
img.draw_string(r.rect()[0] + 20,r.rect()[1]-20,sorted_list[0][0],颜色=(255,0,0),比例= 2,mono_space=错误的)
来源:m0_48176714
![[第399期]面试官:如何提前终止Java8 lambda表达式forEach?](/upload/images/133288643)
![[第08期]Object类下有多少个方法?](/upload/images/133288644)